Tastsinn für Roboter
Ein neuartiger flacher Drucksensor erreicht die Empfindlichkeit einer Fingerspitze.
Tastsinn für Roboter
Ein neuartiger flacher Drucksensor erreicht die Empfindlichkeit einer Fingerspitze.
Lincoln (USA) - In vielen Autofabriken, Chemieanlagen oder Analyselabors finden sich heute kraftvoll zupackende Roboter. Doch kennen die automatischen Greifer nur zwei Zustände: Festhalten und Loslassen. Verfügten sie über mehr Feingefühl, könnten Roboterhände auch für schwierigere Aufgaben bis hin zu minimal-invasiven Operationen genutzt werden. Wissenschaftler von der University of Nebraska in Lincoln entwickelten für einen maschinellen Tastsinn nun eine druckempfindliche Folie, die Oberflächen fast so genau wie eine menschliche Fingerkuppe erfühlen kann. Ihren Prototyp beschreiben sie in der Zeitschrift „Science“.
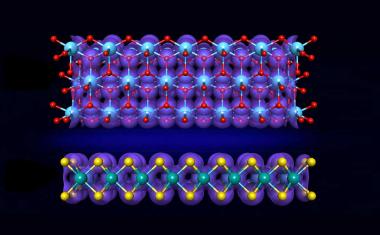
„Es gibt ein großes Interesse an humanoiden Robotern, die Formen, Oberfläche oder Härten von Objekten wahrnehmen können“, schreiben Vivek Maheshwari und Ravi Saraf. Genau diesem Ziel sind die Forscher nun einem großen Schritt näher gekommen. Das zentrale Element ihrer Tastfolie ist ein 100 Nanometer dünner Film, in dem abwechselnd Nanopartikel aus Gold und dem Verbindungshalbleiter Cadmiumsulfid (CdS) aufgeschichtet sind. Getrennt werden die beiden Materialen jeweils von einer dielektrischen Trennschicht. Dieser Tastfilm ist zwischen zwei Elektroden – einem leitfähigen flexiblen Polymer oben und einem Glasträger mit Indiumzinnoxid-Beschichtung unten – gelagert und wird unter elektrische Spannung (8–25 Volt) gesetzt.
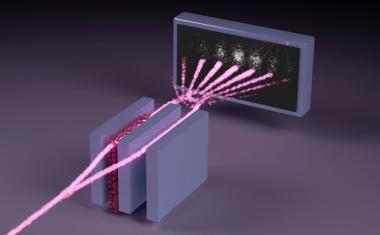
Wird nun auf die obere Plastikfolie Druck ausgeübt, verändert sich der Stromfluss in der Tastfolie. Dadurch werden die halbleitenden CdS-Partikel genau unter dem eingedrückten Bereich zur Lichtaussendung über Elektrolumineszenz angeregt (Abb.). Dieses Licht wird mit einer räumlichen Auflösung von 40 Mikrometern von einem CCD-Bildchip aufgefangen. Aus dieser Aufnahme lässt sich ein digitalisierter Datensatz für den Druckreiz entnehmen.

Abb.: Der neue Tastsensor kann z. B. einen Penny exakt erkennen: In Bereichen, auf die Druck ausgeübt wird, werden CdS-Partikel zur Lichtaussendung über Elektrolumineszenz angeregt. (Quelle: Maheshwari et al.)
Erste Versuche zeigten, dass die Tastfolie bereits bei Drücken von neun Kilopascal reagiert. Damit ist sie ähnlich empfindlich wie eine menschliche Fingerkuppe (10 bis 40 Kilopascal). Auch die hohe räumliche Auflösung stellt alle virtuellen Fühlsysteme mit Piezokristallen oder leitfähigen Polymeren in den Schatten. In folgenden Experimenten muss die Tastfolie von Maheshwari und Saraf noch mit einer Roboterhand kombiniert werden. Dabei gilt es, die Bewegungen mit den Druckdaten aus der Digitalaufnahme zu koppeln. Wird dieses Steuerungsproblem gelöst, könnten fühlende Roboter schon in wenigen Jahren Chirurgen bei komplizierten Eingriffen unterstützen.
Jan Oliver Löfken
Weitere Infos:
- Originalveröffentlichung:
V. Maheshwari and R. F. Saraf, High-Resolution Thin-Film Device to Sense Texture by Touch, Science 312, 1501 (2006).
http://dx.doi.org/10.1126/science.1126216 - Kommentar:
R. Crowder, Toward Robots that Can Sense Texture by Touch, Science 312, 1478 (2006).
http://dx.doi.org/10.1126/science.1129110 - University of Nebraska, Lincoln:
http://www.unl.edu - Department of Chemical Engineering:
http://che.unl.edu
Weitere Literatur:
- G. Robles-De-La-Torre, V. Hayward, Nature 412, 445 (2001).
- P. Dario, E. Guglielmelli, C. Laschi, J. Robot. Syst. 18, 673 (2001).
- Y. Okumura et al., Adv. Robot. 18, 699 (2004).
- Y. B. Jia, IEEE Trans. Robot. 21, 726 (2005).
- M. Okamura, M. R. Cutkosky, Int. J. Robot. Res. 20, 925 (2001).
- R. Tajima, S. Kagami, M. Inaba, H. Inoue, Adv. Robot. 16, 381 (2002).