Roboter fürs E-Tanken
Automatisiertes Schnellladesystem für Elektrofahrzeuge vorgestellt.
Für elektrisch angetriebene Fahrzeuge werden weltweit hohe Wachstumsraten prognostiziert: 2025 soll es jährlich bereits 25 Millionen Neuzulassungen geben. Dies erfordert neue technische Lösungen für die Ladeinfrastruktur. So soll der Ladevorgang möglichst ohne Hilfe des Nutzers und so rasch als möglich erfolgen. Forscher des Institutes für Fahrzeugtechnik der Technischen Universität Graz haben nun ein automatisiertes konduktives, kabelgebundenes Robotersystem entwickelt, das erstmals das Laden von verschiedenen Fahrzeugen direkt nacheinander ermöglicht.
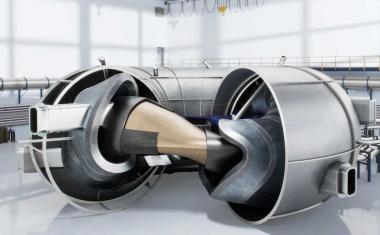
Abb.: Dieser Prototyp eines robotergesteuerten Schnellladesystems für E-Fahrzeuge wurde an der TU Graz entwickelt. (Bild: FTG / TU Graz)
Das CCS-Komfortladesystem ist für Standard- und Normladestecker von Elektromobilen konzipiert, sodass keine speziellen Adaptionen an den Fahrzeugen erforderlich sind. Bernhard Walzel von der TU Graz erklärt: „Wir haben es zum ersten Mal geschafft, dass eine roboterbasierte Ladestation mehrere Fahrzeuge hintereinander selbstständig elektrisch auflädt, ohne dass die Fahrzeuge dafür speziell adaptiert werden müssen. Dank ausgeklügelter Kameratechnik erkennt der Roboter die Ladebuchse der Fahrzeuge und kann so selbstständig verschiedene E-Autos, die nacheinander in die Ladestation einfahren, aufladen. Das Problem der Fahrzeugpositionierung am Ladeplatz konnte also gelöst werden, sodass das System selbst dann funktioniert, wenn Park-Fehlstellungen auftreten.“ Ebenfalls bis dato einzigartig sei, so Walzel, dass der Roboter bei unterschiedlichen Lichtbedingungen in einem Gebäude, aber auch im Freien funktioniert.
Eine besondere Herausforderung stellte für die Wissenschafter die Programmierung und Integration der Sensortechnologie zur exakten Lage- und Typerkennung von Fahrzeug und Ladebuchse dar. Dabei wurde eng mit dem Institut für Maschinelles Sehen und Darstellen der TU Graz zusammengearbeitet und das Roboter-Ladesystem mit mehreren Kameras bestückt. Die Kameras erkennen Position und Typ der Ladebuchse und definieren für den Roboter, wo das Ladekabel angesteckt werden muss. Ziel war es, die Sensortechnologie und den Laderoboter so auszulegen, dass auch bei Verwendung unterschiedlicher Fahrzeugtypen und Fahrzeugpositionen keine speziellen Adaptionen am Fahrzeug erforderlich sind. Das System ist also für alle Standard- und Normladestecker anwendbar. Zur Lösung der Problemstellung entwickelten die Wissenschafter ein komplexes mechatronisches System bestehend aus Sensortechnologie, Roboterkinematik und Robotersteuerung.
Die Technologie ist darauf ausgelegt, das automatisierte Schnellladen von E-Fahrzeugen mit hohen Ladeleistungen zu ermöglichen und elektrische Fahrzeuge innerhalb weniger Minuten für längere Fahrdistanzen aufzuladen. Diese hohen Ladeleistungen erfordern neuartige flüssigkeitsgekühlte Stecker und Kabel, welche mit Hilfe des robotergesteuerten Schnellladesystems einfach mit dem Auto verbunden werden können. Das Konzept umfasst auch zukünftiges vollautomatisches Parken und Laden von E-Fahrzeugen. Als Projektpartner mit an Bord waren BMW, Magna Steyr Engineering Graz, der Linzer Automatisationsspezialist Keba sowie der Österreichische Verein für Kraftfahrzeugtechnik in Wien.
TU Graz / JOL