Elektronische Haut wird empfindlicher
Komplexe Magnetsensoren imitieren Funktion von feinen Härchen.
Einem Forschungsteam aus Chemnitz und Dresden ist ein großer Schritt bei der Weiterentwicklung empfindungsfähiger elektronischer Haut mit integrierten Härchen gelungen. Während man in der Regel kleinste Berührungen der Härchen auf dem Arm spüren und auch die Richtung der Berührung zuordnen kann, gelang es technologisch bisher nicht, die Richtung taktiler Einflüsse auf E-Skin-Oberflächen zu erfassen. Daher ist elektronische Haut aktuell noch kaum in der Lage, den vollen Informationsgehalt einer Berührung wahrzunehmen. Ein Forschungsteam unter Leitung von Oliver G. Schmidt von der Technischen Universität Chemnitz, hat nun eine Methode vorgestellt, um eine äußerst empfindliche Einheit richtungsabhängiger magnetischer 3D-Sensoren zu entwickeln, die in ein E-Skin-System integriert werden kann.
Dabei nutzten die Forschenden einen völlig neuen Integrationsansatz zur Miniaturisierung und ultrakompakten Anordnung mikroelektronischer Komponenten. „Unser Ansatz erlaubt die exakte Anordnung funktionaler Sensorelemente in drei Dimensionen, die in einem parallelen Verfahrensschritt auf einem Chip erzeugt werden kann. Solche Sensorsysteme sind mit konventionellen Methoden der Mikroelektronik extrem schwer herzustellen", sagt Doktorand Christian Becker. Kern des vom Forschungsteam vorgestellten Sensorsystems ist ein anisotropischer magnetoresistiver Sensor (AMR). Mit einem AMR können Veränderungen in Magnetfeldern präzise bestimmt werden. Aktuell werden AMRs zum Beispiel als Drehzahlsensoren im Pkw oder zur Positions- und Winkelbestimmung von beweglichen Komponenten in Maschinen eingesetzt.
Zur Entwicklung ihres hochkompakten Sensorsystems bedienten sich die Forschenden des Mikro-Origami-Verfahrens. Dieses Verfahren dient der automatischen Auffaltung von mehreren AMR Sensorkomponenten auf einem Chip in eine drei dimensionale Würfelstruktur, die das magnetische Vektorfeld auflösen kann. Mit der Mikro-Origami Methode passen viele mikroelektronische Komponenten auf engsten Raum mit Geometrien, die man mit konventionellen Mikrochip-Herstellungsverfahren nicht realisieren kann. „Mikro-origamische Verfahren wurden vor mehr als zwanzig Jahren erstmals entwickelt, und es ist wunderbar zu sehen, wie sich das volle Potential dieser eleganten Technologie nun für neuartige mikroelektronische Anwendungen nutzen lässt“, sagt Schmidt. Das Forschungsteam integrierte die Mikro-Origami-Magnetsensoren in eine aktive elektronische Matrix, mit der jedes einzelne Sensorelement durch elektronische Schaltkreise bequem adressiert und ausgelesen werden kann. „Die Kombination aus aktiver Sensormatrix mit sich selbst organisierenden Mikro-Origami-Bauteilen ist ein völlig neuer Ansatz für die Miniaturisierung und Integration von 3D-Sensorsystemen mit hoher Auflösung“, sagt Daniil Karnaushenko.
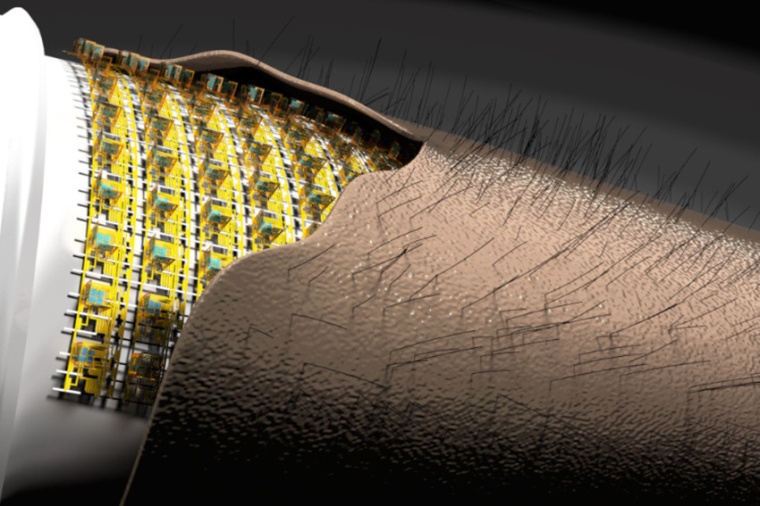
Darüber hinaus ist es dem Forschungsteam gelungen, die 3D-Magnetfeldsensoren mit feinsten künstlichen Härchen in eine künstliche Haut zu integrieren. Die Härchen wurden jeweils mit einer magnetischen Wurzel ausgestattet. Die Haut besteht aus einer elastischen Polymermatrix, in die Elektronik und Sensorik integriert wurde. Das ist so ähnlich wie bei echter organischer Haut, in der die Nerven und Sinneszellen eingebettet sind. Werden die Härchen leicht berührt, bewegen sich die magnetischen Wurzeln in eine bestimmte Richtung, dessen Positionen von den darunterliegenden Magnetfeldsensoren exakt bestimmt werden können. Das bedeutet, dass die Sensormatrix nicht nur die Bewegungen der Haare registriert, sondern auch deren Richtung. Somit wird – wie bei echter Haut – jedes Haar auf einer E-Skin zu einer eigenen Sensoreinheit, die Veränderungen in der direkten Umgebung richtungsabhängig wahrnehmen kann.
Die magneto-mechanische Kopplung zwischen 3D Magnetfeldsensor und magnetischer Haarwurzel stattet E-Skin mit einer neuen Form der berührungsempfindlichen Wahrnehmung aus. Diese Fähigkeit ist zum Beispiel von großer Bedeutung, wenn Menschen und Roboter eng zusammenarbeiten und ein Roboter seinen menschlichen Gegenpart kurz vor einer gewollten Berührung oder einer gefährlichen Kollision vorrausschauend und exakt wahrnehmen soll.
TU Chemnitz / JOL