Guter Halt für Greifroboter
Blick auf Insekten kann Roboterbewegungen optimieren.
Eine ganze Generation von Greifrobotern wurde nach einem bestimmten Design-Prinzip entwickelt. Ein internationales Forschungsteam aus der Biomechanik hat es jetzt nach dem Vorbild von Insekten optimiert. Unter der Leitung der Süddänischen Universität übertrugen Forschende der Christian-Albrechts-Universität zu Kiel es zum ersten Mal von Hand- auf Fußelemente. Damit könnten Roboter in Zukunft nicht nur besser und mit weniger Kraftaufwand greifen, sondern sich auch zügig und sicher auf unebenen Oberflächen fortbewegen.
Viele Roboter können mit ihren Greifarmen andere Objekte fest umschließen ohne dabei großen Druck auszuüben. Das gelingt, weil sie sich besonders gut an die Kontur ihrer Zielobjekte anpassen. Dahinter steckt ein Design-Prinzip aus der Natur, der Fin-Ray-Effekt. „Es ist faszinierend: Drückt man auf eine Seite eines spitzen Dreiecks, biegt es sich nicht von einem weg – was zu erwarten wäre – sondern einem entgegen“, beschreibt der Kieler Forscher Stanislav Gorb das Phänomen. Vor rund 25 Jahren hat es der deutsche Biologe Leif Kniese erstmals bei Fischflossen beobachtet: Dank spezieller Querverstrebungen im Inneren passen sich die Flossen optimal an verschiedene Strömungsverhältnisse an. In den Füßen vieler Insekten finden sich ähnliche Verstrebungen. Sie sorgen dafür, dass sie sich besser an Oberflächen anpassen und dort sicher anhaften. „Das ist eine unserer zentralen Forschungsfragen: Warum haften Insekten ohne viel Kraftaufwand so gut an Oberflächen? Wie stellen sie die dafür nötige große Kontaktfläche her?“, fasst Gorb den Fokus seiner Arbeitsgruppe „Funktionelle Morphologie und Biomechanik“ zusammen.
Mit seinem Team untersuchte Gorb verschiedene Insektenfüße wie die der Heuschrecke Tettigonia viridissima (Grünes Heupferd). Sie stellten fest: Während die Querverstrebungen in „Fin-Ray“-Greifarmen immer in einem Neunzig-Grad-Winkel angebracht sind, kommen sie in Insekten mit verschiedenen Winkeln vor. Was für Auswirkungen andere Winkel haben können, war für den Fin-Ray-Effekt bisher nicht detailliert untersucht worden. Im Rahmen der Studie berechneten die Kieler Forschenden jetzt, welche Kräfte bei unterschiedlichen Winkeln auf die Greifarme und ihre Zielobjekte wirken. Die Ergebnisse ihrer Computersimulationen überprüften sie in Experimenten und Kraftmessungen mit Modellen aus dem 3D-Drucker.
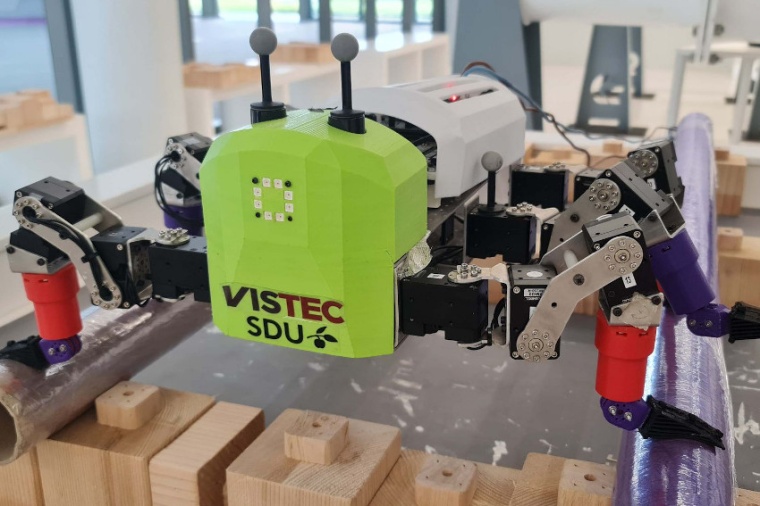
„Wir sahen, dass Greifarme mit kleineren Winkeln ihre Zielobjekte noch leichter umschließen und dafür auch noch weniger Kraft benötigen“, so Gorb. Poramate Manoonpong von der SDU ergänzt: „Damit wären Roboter zum Beispiel in der Lage, Lebensmittel und andere empfindliche Gegenstände mit etwa zwanzig Prozent weniger Energie zu greifen – das könnte jahrealte Design-Paradigmen einer ganzen Greifroboter-Branche verändern.“ Schließlich übertrugen die Kieler Forschenden das Greifprinzip der Roboterarme zum ersten Mal auf die Füße von Robotern, um auch damit rundliche Objekte sicher umschließen zu können. Nach ersten Tests an der SDU mit einem einzelnen Roboterfuß wurde anschließend ein kompletter, sechsfüßiger Roboter dazu gebracht, auf zwei Rohren und steinigem Untergrund zu laufen. Die Forschenden stellten hierbei fest, dass sich Roboter mit Querverstrebungen in einem Zehn-Grad-Winkel schneller und einfacher bewegten und weniger Energie verbrauchten als mit Verstrebungen in einem klassischen Neunzig-Grad-Winkel. „Das könnte zum Beispiel für die Öl- oder Gasindustrie interessant sein“, so Manoonpong.
Die bisherigen Ergebnisse sind vielversprechend, basieren aber auf Greifelementen aus einem weichen Material. Als nächstes geht es darum, Greifer aus einem Material zu entwickeln, das sowohl flexibel ist, um sich an Objekte oder unwegsame Untergründe anzupassen, als auch robust und widerstandsfähig, um langfristig unter realen Umweltbedingungen zu bestehen.
CAU Kiel / JOL
Weitere Infos
- Originalveröffentlichung
P. Manoonpong et al.: Fin Ray Crossbeam Angles for Efficient Foot Design for Energy-Efficient Robot Locomotion, Adv. Intell. Sys. 4, 2100133 (2022); DOI: 10.1002/aisy.202100133 - Funktionelle Morphologie und Biomechanik, Christian-Albrechts-Universität zu Kiel
- Biorobotics, University of Southern Denmark (SDU), Odense, Dänemark