Neuer Sensor für eine elektronische Haut
Modul verarbeitet Reize sowohl berührungslos als auch durch den direkten Kontakt.
Durch den geschickten Einsatz von Magnetfeldern konnten Wissenschaftler des Helmholtz-Zentrums Dresden-Rossendorf HZDR und der Johannes Kepler Universität Linz erstmals einen elektronischen Sensor entwickeln, der gleichzeitig Reize sowohl berührungslos als auch durch den direkten Kontakt verarbeiten kann. Bisher sind Versuche, diese Funktionen auf einem einzelnen Gerät zu vereinen, an den überschneidenden Signalen der verschiedenen Stimuli gescheitert. Da sich der Sensor problemlos auf der menschlichen Haut auftragen lässt, könnte er intuitivere und natürlichere Interaktionen in Umgebungen der Virtuellen oder Erweiterten Realität ermöglichen.
Das größte Organ des Menschen – die Haut – ist das wohl funktionell vielseitigste Körperteil: Sie kann nicht nur verschiedenste Reize sekundenschnell unterscheiden, sondern auch die Intensität der Signale über eine weite Spanne einordnen. Einem Forscherteam um Denys Makarov vom HZDR-Institut für Ionenstrahlphysik und Materialforschung sowie dem Soft Electronics Laboratory von Martin Kaltenbrunner der Linzer Universität ist es gelungen, ein elektronisches Gegenstück herzustellen, das ähnliche Eigenschaften aufweist. Nach Ansicht der Wissenschaftler könnte ihr neuer Sensor das Zusammenspiel zwischen Mensch und Maschine stark vereinfachen, wie Denys Makarov erklärt: „Anwendungen in der Virtuellen Realität werden immer komplexer. Wir benötigen deswegen Verbindungsgeräte, die unterschiedliche Interaktionsmethoden kombinieren.“
Die bisherigen Systeme funktionieren allerdings entweder nur, indem sie tatsächliche physische Berührungen registrieren oder indem sie Objekte über technische Mittel berührungslos verfolgen. Zum ersten Mal sind die beiden Interaktionswege nun auf dem Sensor, den die Wissenschaftler als „Magnetisches mikroelektromechanisches System“ (m-MEMS) bezeichnen, vereint. „Unser Sensor verarbeitet die elektrischen Signale der berührungslosen und der taktilen Interaktionen in unterschiedlichen Regionen“, erläutert Jin Ge vom HZDR.„Dadurch kann er den Ursprung der Reize in Echtzeit unterscheiden und störende Einflüsse von anderen Quellen ausblenden.“
Auf einer hauchdünnen Polymer-Folie haben sie zunächst einen Magnetsensor angebracht, der auf dem Riesenmagnetowiderstand (GMR) aufbaut. Diese Folie wiederum verschließt ein Loch, das genau in der Mitte einer zweiten Silizium-basierten Polymerschicht (Polydimethylsiloxan) liegt. In diese runde Aussparung fügten die Forscher einen Permanentmagneten ein, aus dessen Oberfläche weiche, pyramidenartige Spitzen herausragen. „Das Ergebnis erinnert zwar eher an ein Stück Frischhaltefolie mit optischen Verzierungen“, scherzt Makarov. „Aber gerade darin liegt eine der Stärken unseres Sensors.“ Denn so bleibt er äußerst flexibel: Er passt sich an alle Umgebungen perfekt an. Selbst unter gekrümmten Bedingungen funktioniert er ohne seine Funktionalität einzubüßen. Der Sensor lässt sich somit ganz einfach zum Beispiel auf der Fingerspitze platzieren.
Und genau auf diese Weise haben die Wissenschaftler ihre Entwicklung getestet, beschreibt Jin Ge: „Wir haben auf das Blatt eines Gänseblümchens einen Permanentmagneten angebracht, dessen Feld in die entgegengesetzte Richtung zu dem in unserer Plattform eingebauten Magneten zeigt.“ Wenn sich der Finger nun diesem externen Magnetfeld nähert, ändert sich der elektrische Widerstand des GMR-Magnetsensors: er fällt. Bis zu dem Zeitpunkt, an dem der Finger tatsächlich das Blatt berührt. In dem Moment steigt er schlagartig an, da der eingebaute Permanentmagnet näher an den GMR-Sensor gedrückt wird und so das externe Magnetfeld überlagert. „Auf diese Weise kann unsere m-MEMS-Plattform sekundenschnell eindeutig den Wechsel von der berührungslosen zur taktilen Interaktion registrieren“, fasst Jin Ge zusammen.
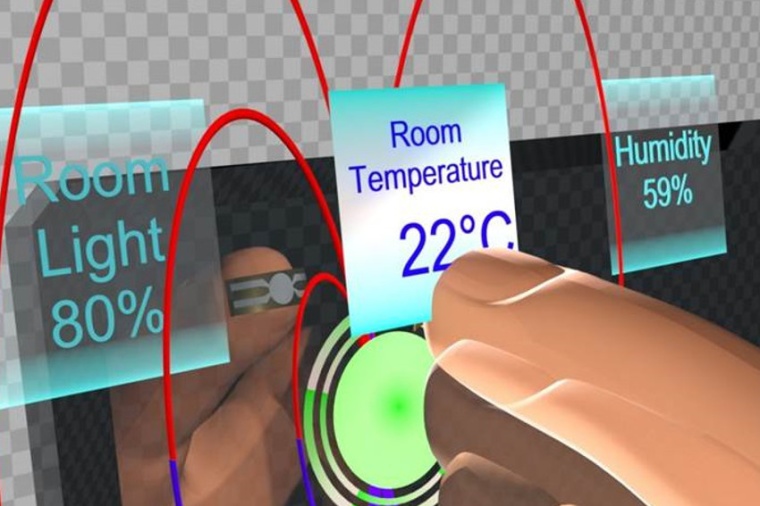
Dadurch lassen sich mit dem Sensor sowohl physische, als auch virtuelle Objekte gezielt steuern, wie ein Experiment des Teams zeigt: Auf eine Glasplatte, die sie mit einem Permanentmagneten versehen haben, haben die Physiker virtuelle Knöpfe projiziert, die reale Bedingungen, zum Beispiel die Raumtemperatur oder die Helligkeit, manipulieren. Durch das Zusammenspiel mit dem Permanentmagneten konnten die Wissenschaftler mit Hilfe eines hölzernen Fingers, auf dem sie die elektronische Haut aufgetragen hatten, zunächst ohne Berührung die gewünschte virtuelle Funktion auswählen. Sobald der Finger die Platte berührte, ist die m-MEMS-Plattform automatisch auf den taktilen Interaktionsmodus umgesprungen. Über leichten oder starken Druck ließ sich im Anschluss beispielsweise die Temperatur im Raum dementsprechend senken oder steigen.
Eine Handlung, die bislang mehrere Interaktionen erfordert hätte, konnten die Forscher somit auf eine einzige reduzieren. „Das mag zunächst vielleicht nur wie ein kleiner Schritt klingen“, schätzt Martin Kaltenbrunner ein. „Langfristig lässt sich auf dieser Grundlage jedoch eine bessere Schnittstelle zwischen Mensch und Maschine aufbauen.“ So könnte die elektronische Haut – neben Räumen der virtuellen Realität – auch Einsatz in sterilen Umgebungen finden. Chirurgen könnten die Sensoren nutzen, um medizinische Geräte während einer Behandlung berührungslos zu bedienen, was die Gefahr einer Kontamination verringern würde.
HZDR / JOL
Weitere Infos
- Originalveröffentlichung
J. Ge et al.: A bimodal soft electronic skin for tactile and touchless interaction in real time, Nat. Commun. 10, 4405 (2019); DOI: 10.1038/s41467-019-12303-5 - Institut für Ionenstrahlphysik und Materialforschung, Helmholtz-Zentrum Dresden-Rossendorf HZDR, Dresden
- Soft Electronics Laboratory, Johannes Kepler Universität Linz