Drohnen auf Schwarm-Missionen
Intelligente Koordination steigert Effizienz von unbemannten Luftfahrzeugen.
Unbemannte Luftfahrzeuge (UAV), vulgo Drohnen,bieten vielfältige Einsatzmöglichkeiten in zivilen Bereichen. Da sie mit hochentwickelten Sensoren und Kommunikationsgeräten ausgestattet sind, können Drohnen einen Schwarm bilden. Wissenschaftler des Helmholtz-Instituts Freiberg für Ressourcentechnologie und des Center for Advanced Systems Understanding haben Tests durchgeführt, um einen konzeptionellen Rahmen für einen autonomen Schwarm mit einem bestimmten Auftrag zu schaffen: Es sollen insbesondere unregelmäßig strukturierte Umgebungen effizient abgescannt werden.
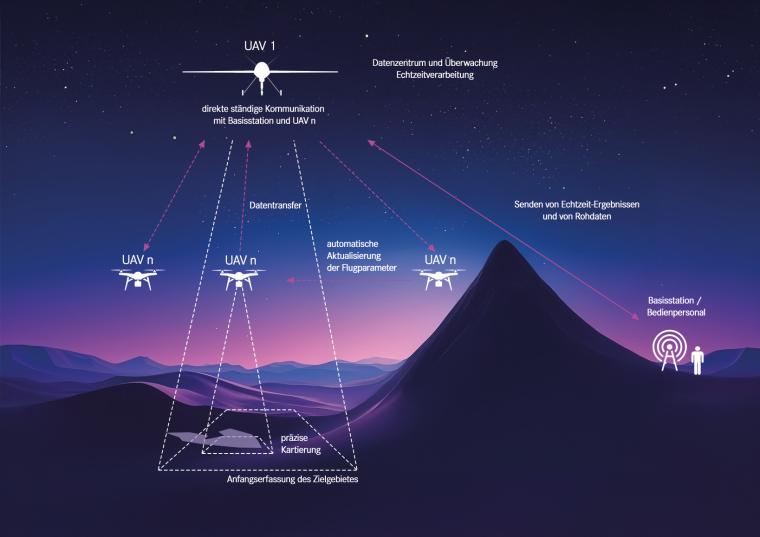
Ein intelligenter UAV-Schwarm ist eine Flotte autonomer Drohnen, die nach einem bestimmten Regelwerk kooperiert, um eine komplexe Mission ohne menschliches Eingreifen effizient auszuführen. Durch die Zusammenarbeit mehrerer Drohnen in hierarchischen Gruppen können die Grenzen einzelner UAVs überwunden werden, so dass viele verteilte Aufgaben auf einmal erledigt werden können. Der vorgeschlagene konzeptionelle Rahmen basiert auf dem Leader-Followers-Paradigma, dabei verteilt die führende Drohne die Aufgaben an die weiteren Drohnen. „Unsere Forschung zielt darauf ab, den gemeinsamen wirtschaftlichen Wohlstand, die soziale Entwicklung und den Umweltschutz zu verbessern, zum Beispiel durch die Eindämmung von Naturgefahren, die Kartierung der Erdoberfläche zur Erschließung neuer Ressourcen oder die Überwachung der Umwelt“, sagt Wilfried Yves Hamilton Adoni.
„Wir haben verschiedene Hindernisse modelliert, die bei einer Schwarm-Mission in einer unregelmäßig strukturierten Umgebung auftreten können, d.h. in einer Umgebung, in der sich informationsreiche, komplexe Bereiche mit informationsarmen Bereichen abwechseln. Im Vergleich zu den derzeitigen UAV-Schwarmkonfigurationen ist das von uns vorgeschlagene System widerstandsfähiger, da es sich schnell von Systemausfällen erholen kann. Wir haben die Tests unter Berücksichtigung des aktuellen Stands der Technik sowohl in virtuellen als auch realen UAV-Schwärmen durchgeführt. Sie belegen, dass unser System zuverlässig und vertrauenswürdig ist und durchweg gute Leistungen erbringt. Unser Ansatz bestätigt beispielweise eine gute Leistung in Bezug auf den Energieverbrauch für unser Szenario großer, unregelmäßig strukturierter Gebiete“, so Adoni.
Dabei diskutiert er Aspekte wie Befehlsketten und Konsensfindung zwischen den Drohnen, Kommunikation zwischen dem Leader und den Followern sowie Verteilung der anfallenden Berechnungen unter den Drohnen anhand eines spezifischen Beispielsetups, das besonders geeignet ist, um Missionen in einer unregelmäßig strukturierten Umgebung zu erledigen. „Aktuell arbeiten wir an einem quelloffenen Software-Framework für ein Roboterbetriebssystem, das speziell für derartige Schwarmmissionen geeignet ist“, sagt Adoni. Die Fähigkeit von Drohnen, unzugängliche Regionen zu erreichen, ist ein wichtiger Vorteil für Erkundungsmissionen. Da ein Drohnenschwarm problemlos in der Größe angepasst und so auch ein großes Gebiet in kurzer Zeit abgedeckt werden kann, eignen sich Schwärme für Aufklärungs- und Überwachungsmissionen.
Die Aufnahmen des Schwarms können als 3D-Visualisierung in Echtzeit übertragen werden. Dies ermöglicht es, eine realistische Karte der Umgebung zu erstellen. Die häufigsten Schwierigkeiten, die es zu bewältigen gilt, sind Kollisionsvermeidung und Hinderniserkennung. Auch der Energieverbrauch und die Batterielebensdauer stellen Hürden dar. Und es gelten gesetzliche Vorgaben für den Einsatz von Drohnen, die sich von Land zu Land unterscheiden. Drohnenschwärme sind als vollständig verteilte Systeme konzipiert, in denen jede Drohne die eigene Umgebung analysiert und mit anderen zusammenarbeitet, um individuelle Aktionen auszuführen, die gemeinsam zur Erreichung des Schwarm-Gesamtziels beitragen. Das Funktionsprinzip von Schwärmen basiert auf einer Reihe von Algorithmen, die es jeder Schwarmeinheit ermöglichen, zu kommunizieren und Aufgaben zu delegieren, Flugbahnen zu planen und Flüge zu koordinieren, um die Gesamtziele des Schwarms effizient zu erreichen.
HZDR / Casus / JOL
Weitere Infos
- Originalveröffentlichung
W. Y. H. Adoni et al.: Intelligent Swarm: Concept, Design and Validation of Self-Organized UAVs Based on Leader–Followers Paradigm for Autonomous Mission Planning, Drones 8, 575 (2024); DOI: 10.3390/drones8100575 - Helmholtz-Instituts Freiberg für Ressourcentechnologie (HIF), Freiberg








