Tauchroboter für Jupitermond Europa
Vollautonomes Unterwasserfahrzeug für eine Mission im Ozean des Eismonds.
Auf der Suche nach Leben in unserem Sonnensystem spielt der Jupitermond Europa eine wichtige Rolle: Unter seiner kilometerdicken Eisdecke wird ein tiefer Ozean vermutet, der die Grundlage für extraterrestrisches Leben bieten könnte. Am Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz DFKI wird an Konzepten gearbeitet, um den Ozean durch autonome Unterwasserfahrzeuge zu erforschen. Im Anschlussprojekt zur sicheren Langzeitnavigation des bereits entwickelten Roboterteams wurde nun mit einem neuen Fahrzeugmodell und einer verbesserten Navigation ein weiterer Schritt in Richtung Realmission getan.

In durchschnittlich 600 Millionen Kilometern Entfernung, unter einer bis zu 15 Kilometer dicken Eisdecke, am Grund eines darunterliegenden, rund 100 Kilometer tiefen Ozeans – an diesem extremen Ort könnte es zu finden sein. Bei der Suche nach extraterrestrischem Leben sind die hydrothermalen Quellen, die auf dem Jupitermond Europa vermutet werden, von großem Interesse. Durch das Spenden von Wärme und Mineralien bieten sie einen potentiellen Lebensraum für Organismen – ähnlich wie am Meeresgrund auf der Erde. Um den Ozean auf Europa und die vermuteten Quellen untersuchen zu können, entwickelten die Wissenschaftler des Robotics Innovation Centers im Projekt Europa-Explorer (EurEx) ein einzigartiges Navigationskonzept für den vollautonomen Einsatz von Fahrzeugen unter einer geschlossenen Eisdecke.
Im hieran anknüpfenden Projekt EurEx – Sichere Langzeitnavigation (EurEx-SiLaNa) wurde nun durch weitere Forschungs- und Entwicklungsaktivitäten die Navigationsleistung des Roboterteams, bestehend aus dem autonomen Unterwasserfahrzeug (AUV) Leng und dem IceShuttle Teredo, erfolgreich verbessert. Während die Thermalbohrung zur Durchdringung der kilometerdicken Eisschicht weiter an der Rheinisch-Westfälischen Technischen Hochschule Aachen erforscht wird, überführten die Forscher am DFKI die Technologien des AUV Leng zur Exploration des Ozeans auf Europa in eine neue, verbesserte Version – dem DeepLeng.
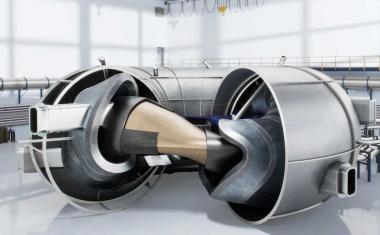
Auffällig an dem autonomen Unterwasserfahrzeug DeepLeng ist vor allem das neue Aussehen: Knapp einen Meter kürzer und sieben Zentimeter breiter ist das torpedoförmige System nun. Neben einer verbesserten Navigationsfähigkeit, einer vereinfachten Kabelstruktur und einem geringen Wartungsaufwand bietet DeepLeng zusätzlich ein Nutzlastkompartment für die Realmission. Hier können beispielsweise ein mikrobiologisches Labor oder ein Probensammler verbaut werden. Um die auftretenden Korrosionsschäden beim ersten AUV aus Aluminium und Edelstahl vorzubeugen, sollte ursprünglich Titan eingesetzt werden. Im Verlauf des Projekts EurEx-SiLaNa wurde jedoch entschieden, Glasdruckkörper und Trennkörper aus Kunststoff einzusetzen. Hierdurch können nicht nur Korrosionsschäden vollständig verhindert, sondern ebenso Materialkosten gespart und ein tieferes Abtauchen ermöglicht werden.
Ein weiteres zentrales Vorhaben des Projekts EurEx-SiLaNa war die Implementierung einer Missionsbeschreibungssprache. Die Missionsbeschreibung des AUVs realisierten die Wissenschaftler ursprünglich, indem sie den Ablauf direkt im Quellcode umsetzten. Dies erforderte jedoch bei jeder Missionsänderung einen Systemneustart. Durch ein Missionsmanagement mit einer definierten Missionsbeschreibungssprache wurde dem nun Abhilfe geschaffen. So können DeepLeng und andere AUVs, die die selbe Softwarearchitektur besitzen, verschiedene Teilfunktionalitäten verknüpfen und auf äußere Einflüsse durch eigene Entscheidungen reagieren. Getestet wurde DeepLeng zunächst in der Druckkammer des Robotics Innovation Center, wo die neuen Komponenten einem Druck von bis zu 600 bar ausgesetzt wurden – dies entspricht einer terrestrischen Meerestiefe von rund sechs Kilometern. Auch die Sensorik konnte erweitert und in Feldversuchen erprobt werden: Mit einem Fächerecholot, der zukünftig in DeepLeng verbaut wird, konnte das autonome Unterwasserahrzeug Dagon den Boden des Stadtwaldsees in Bremen erkunden. Da die Softwarearchitektur bei beiden AUVs dieselbe ist, konnten die Technologien und die neue Missionsbeschreibungssprache problemlos transferiert werden.
Als Fortführung des Projekts Europa Explorer wurde EurEx-SiLaNa mit rund 650.000 Euro vom Projektträger DLR mit Mitteln des Bundesministeriums für Wirtschaft und Energie gefördert. Die Forschungsarbeiten des DFKI Robotics Innovation Center sind Teil der EnEx-Initiative des DLR, in der neben Europa auch an einer möglichen Erforschung des Jupitermonds Encaledus gearbeitet wird. Zur Weiterführung plant das Team um Frank Kirchner ein Folgeprojekt im Frühjahr 2020, im Rahmen dessen DeepLeng fertiggestellt und unter anderem in Skandinavien unter Eis getestet werden soll.
DFKI / JOL