Autonome Roboter unter dem Eis
Projektlinie Triple dient der Entwicklung autonom agierender Untersee-Vehikel.
Marum / DE
Die vom Bundesministerium für Wirtschaft und Klimaschutz geförderte Projektlinie Triple geht in die zweite Förderphase. In dem am Marum – Zentrum für Marine Umweltwissenschaften der Universität Bremen – beheimateten Forschungsprojekt Triple-nanoAUV 2 wird ein autonomes Miniaturfahrzeug für Technologieeinsätze unter Eis entwickelt. Ziel ist es, das Fahrzeug mit allen dazugehörigen Komponenten 2026 in der Antarktis zu testen.
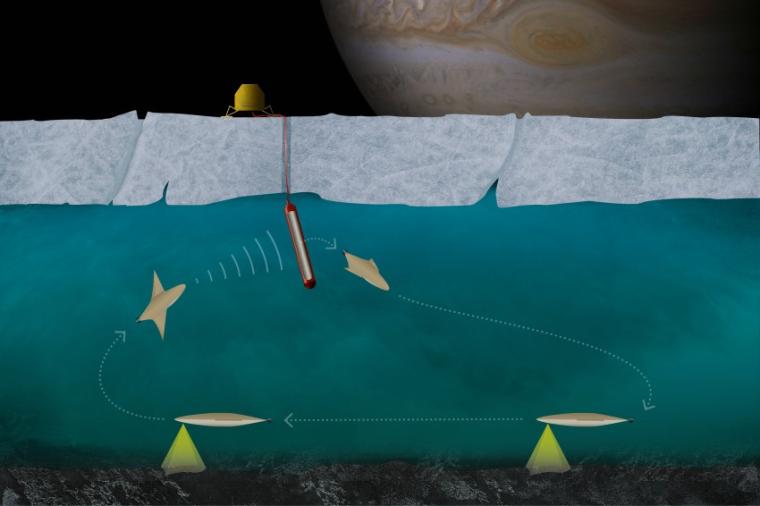
Seit Jahren vermuten Forscher Ozeane aus Wasser unter den mit Eis bedeckten Monden Enceladus und Europa. Denn auch im All bedeutet Wasser möglicherweise Leben – selbst, wenn es unter einer Eisschicht vorkommt. Auf der Erde und erst recht im All ist die Untersuchung solcher unter einer kilometerdicken Eisoberfläche liegenden Gewässern jedoch eine enorme Herausforderung: Wie kommen Technologien durch den mächtigen Eispanzer, und wie kann unter den dort gegebenen extremen Umgebungsbedingungen eine Exploration des Ozeans erfolgen? Welche wissenschaftliche Sensorik ist für die Suche nach Spuren von Leben erforderlich? Wie werden Proben geborgen? Wie kann all das ablaufen, ohne ein noch unbekanntes Ökosystem zu verunreinigen?
Das am Marum koordinierte Verbundprojekt Triple-nanoAUV 2 setzt sich vor allem mit den technischen Herausforderungen auseinander. Das Akronym Triple steht für „Technologies for Rapid Ice Penetration and subglacial Lake Exploration“, auf Deutsch „Technologien für die schnelle Eisdurchdringung und die Erforschung von mit Eis bedeckten Seen“. Das Projekt ist neben den Triple Verbundprojekten Triple-GNC und Triple-LifeDetect Teil der DLR-Explorer-Initiativen. Die Entwicklungen der Triple-Projekte sollen in Phase 2 zusammengeführt und gemeinsam bei einem Feldversuch unter dem antarktischen Schelfeis nahe der Neumayer III-Station im Frühjahr 2026 getestet werden.
Mit industriellen Partnern aus den Bereichen Raumfahrt und Unterwasser-Akustik sowie assoziierten Triple-Projekten wird am Marum dafür ein kleiner autonomer Unterwasserroboter konstruiert – Autonomous Underwater Vehicle, kurz AUV – sowie ein LRS (Launch & Recovery System), mit dem das Fahrzeug unter Eis ausgesetzt und wieder geborgen wird. Das LRS soll dem nanoAUV ermöglichen, an einer Unterwasserstation anzudocken, um gesammelte Daten zu übermitteln, seine Batterie aufzuladen und somit längere Zeit unter Wasser zu bleiben. Das Fahrzeug wird, da es als Nutzlast in einer Schmelzsonde durch das Eis transportiert werden muss, wesentlich kleiner konstruiert als es bei Unterwasserfahrzeugen üblich ist, nämlich mit einem Durchmesser von etwa zehn und einer Länge von zirka fünfzig Zentimetern.
Unter dem Kontinentaleis der Antarktis werden in subglazialen Seen unbekannte Ökosysteme vermutet. Die Erkundung der mit bis zu 4000 Metern dickem Eis bedeckten Gewässer ist technisch enorm anspruchsvoll. „Solche Nano-Fahrzeuge können dabei helfen, insgesamt ein besseres Verständnis für marine Ökosysteme zu gewinnen“, sagt Projektleiter Ralf Bachmayer vom Marum. „Das neue autonome System ist einzigartig und soll zukünftig auch die Erforschung der globalen Flüssigwasserozeane unter der eisigen Oberfläche des Jupiter-Eismonds Europa und des Saturnmonds Enceladus ermöglichen. Vor allem die Miniaturisierung ist dabei eine Herausforderung in der Entwicklung – hierfür gibt die Sonde die Maße vor. Zudem müssen alle Komponenten den hohen Drücken unter Wasser standhalten.“
„Ziel ist es, Expertise innerhalb der DLR Explorer Initiativen für einen Einsatz bei einer möglichen internationalen Raumfahrtmission zu sammeln. In ersten Feldversuchen wird die Schmelzsonde mit dem als Nutzlast integrierten nanoAUV zunächst bei einer Eisdicke von 100 Metern eingesetzt“, erklärt leitender Ingenieur Sebastian Meckel. „Darüber hinaus ist das nanoAUV gegenüber größeren autonomen Fahrzeugen unteraktuiert, das heißt es ist nur eingeschränkt manövrierfähig. Dies alles erfordert eine sehr große Zuverlässigkeit und eine enge Abstimmung mit den assoziierten Partnern aus Triple-GNC und Triple-LifeDetect.“
Das Projekt folgt auf die Verbundprojekte Triple-nanoAUV1 und Triple-MoDo und führt die Konzepte für das autonome Fahrzeug sowie eine Andock-Station fort. Im Parallelprojekt Triple-IceCraft wurde bereits die Schmelzsonde entwickelt, welche die Eisdecke bei Neumayer III durchdringen soll, um so das nanoAUV im darunter liegenden Wasser auszusetzen. Weitere assoziierte Projekte entwickeln zum Beispiel Navigationssoftware und die wissenschaftliche Nutzlast für das autonome Fahrzeug. Zudem fließen Ergebnisse aus dem Robex-Projekt mit ein, an dem das Marum ebenfalls maßgeblich beteiligt war. Hier wurden zum ersten Mal Raumfahrt- und Tiefseeforschung verknüpft und robotische Systeme für extreme Umgebungen entwickelt.
Das Marum und die Universität Bremen koordinieren das aktuelle Projekt, Partner sind die Firmen DSI Aerospace Technologie GmbH aus Bremen sowie EvoLogics GmbH aus Berlin. Das Projekt hat ein Gesamtfördervolumen von 2,68 Millionen Euro und läuft bis September 2026. Die Gesamtkoordination der Triple-Projektlinie obliegt der Deutschen Raumfahrtagentur im DLR. Teil der zweiten Phase sind neben Triple-nanoAUV die Parallelprojekte Triple-GNC (Navigation und Steuerung), Triple-LifeDetect (wissenschaftliche Nutzlast), und Triple-FRS 2 (Vorfelderkundungssystem zur Implementierung in den Schmelzkopf der Einschmelzsonde).