Keramik mit Feingefühl
Neues Sensormaterial auf der Basis von Keramik-Partikeln.
Frank Clemens entwickelt gemeinsam mit seinem Team im High-Performance Ceramics Labor der Empa weiche Sensormaterialien auf der Basis von Keramik. Solche Sensoren spüren beispielsweise Temperatur, Dehnung, Druck oder Feuchtigkeit, was sie für den Einsatz in der Medizin, aber auch im Bereich der „Soft Robotics“ interessant macht. Unter Keramik verstehen Materialforschende wie Clemens einen anorganischen nichtmetallischen Werkstoff, der in einem Sinter-Prozess unter hohen Temperaturen aus einer Ansammlung von losen Partikeln hergestellt wird. Die Zusammensetzung der Keramik kann variieren – und damit verändern sich auch deren Eigenschaften. Die Forschenden arbeiten mit Materialein wie Kaliumnatriumniobat und Zinkoxid, aber auch mit Kohlenstoffpartikeln.
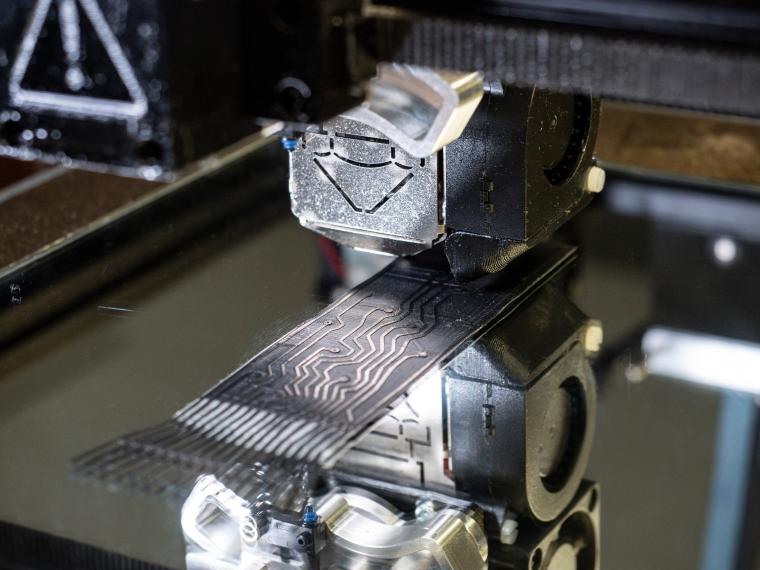
Um daraus weiche Sensoren herzustellen, betten die Forschenden sie in dehnbare Kunststoffe ein. „Wir arbeiten mit hochgefüllten Systemen“, so Clemens. „Wir nehmen eine Matrix aus einem thermoplastischen Kunststoff und füllen sie mit so vielen Keramikpartikeln, wie nur möglich ist, ohne die Dehnbarkeit der Matrix zu beeinträchtigen.“ Wird diese hochgefüllte Matrix dann gedehnt, komprimiert oder Temperaturschwankungen ausgesetzt, verändert sich der Abstand zwischen den Keramikpartikeln und damit die elektrische Leitfähigkeit des Sensors. Dabei muss nicht die gesamte Matrix mit Keramik gefüllt sein. Mittels 3D-Druck können die Forschenden die Keramiksensoren auch als eine Art Nervenbahnen in flexible Bauteile einbetten.
Trivial ist die Herstellung von weichen Keramiksensoren allerdings nicht. In der Regel sind weiche Sensoren auf unterschiedliche Umwelteinflüsse zugleich empfindlich, etwa auf Temperatur, Dehnung und Feuchtigkeit. „Wenn man sie in der Praxis einsetzen will, sollte man aber wissen, was man misst“, erklärt Clemens. Seiner Forschungsgruppe ist es gelungen, weiche Sensoren herzustellen, die sehr selektiv nur auf Druck oder nur auf Temperatur reagieren. Diese Sensoren integrierten die Forschenden in eine prothetische Hand. Die Prothese spürt die Beugung ihrer Finger und merkt, wenn sie eine heiße Oberfläche anfasst. Solche Feinfühligkeit wäre sowohl für Roboter-Greifwerkzeuge als auch für Prothesen für den Menschen von Vorteil.
Noch einen Schritt weiter ging das Team bei der Entwicklung einer weichen Roboterhaut. Ähnlich wie menschliche Haut reagiert die mehrschichtige Kunststoffhaut auf Berührungen und Temperaturunterschiede. Um die komplexen Daten auszuwerten, entwickelten die Forschenden ein KI-Modell und trainierten es anhand von Daten aus rund 4500 Messungen. Auch das erinnert an die menschliche Wahrnehmung, denn die Nervenimpulse aus unserer Haut werden ebenfalls im Gehirn ausgewertet.
In ihrem neuesten Projekt konnten die Forschenden die Keramiksensoren mit künstlichen Muskeln kombinieren. Gemeinsam mit Forschenden der ETH Zürich und der Universität Tokyo haben sie einen Bio-Hybrid-Roboter entwickelt, der seinen Kontraktionszustand mit Hilfe eines weichen, biokompatiblen, gewebeintegrierten piezoresistiven Sensors erkennt. Das Ziel, sagt Frank Clemens, ist die sichere und harmonische Zusammenarbeit von Mensch und Maschine. „Heutige Robotersysteme sind groß, klobig und sehr stark. Sie können für den Menschen gefährlich werden“, sagt er. Sollen wir unsere Arbeitsplätze in Zukunft vermehrt mit Robotern teilen, sollten diese schnell und feinfühlig auf Berührungen reagieren. „Wenn man versehentlich einen anderen Menschen berührt, zieht man sich automatisch sofort zurück“, sagt Clemens. „Wir wollen Robotern denselben Reflex verleihen.“
Empa / JOL